
Heim >Technologie-Peripheriegeräte >KI >Open Source! V2Xverse: Übergabe und Veröffentlichung der ersten Simulationsplattform und des End-to-End-Modells für V2X
Open Source! V2Xverse: Übergabe und Veröffentlichung der ersten Simulationsplattform und des End-to-End-Modells für V2X

- PHPzOriginal
- 2024-06-10 12:42:28518Durchsuche

Synchronisierte Fahrdaten der Fahrzeug-Straßen-Kollaboration
V2X-AD (Vehicle-to-everything-unterstütztes autonomes Fahren), unterstützt durch die Fahrzeug-Straßen-Kollaboration, bietet großes Potenzial für sicherere Fahrstrategien. Forscher haben viele Untersuchungen zu den Kommunikations- und Kommunikationsaspekten von V2X-AD durchgeführt, aber die Auswirkungen dieser Infrastruktur- und Kommunikationsressourcen auf die Verbesserung der Fahrleistung wurden noch nicht vollständig untersucht. Dies unterstreicht die Notwendigkeit, kollaboratives autonomes Fahren zu untersuchen, d. h. wie effiziente Strategien für den Informationsaustausch für die Fahrplanung entwickelt werden können, um die Fahrleistung jedes Fahrzeugs zu verbessern. Dies erfordert zwei wichtige Grundbedingungen: Zum einen eine Plattform, die eine Datenumgebung für V2X-AD bereitstellen kann, und zum anderen ein End-to-End-Fahrsystem mit vollständigen fahrbezogenen Funktionen und Mechanismen zum Informationsaustausch. Was die Plattform betrifft, die die Datenumgebung bereitstellt, kann dies durch die Nutzung des Kommunikationsnetzwerks zwischen Fahrzeugen und die Unterstützung der Infrastruktur erreicht werden. Auf diese Weise können Fahrzeuge die für das Fahren erforderlichen Echtzeit- und Umgebungsinformationen austauschen und so die Fahrleistung verbessern. Andererseits müssen End-to-End-Fahrsysteme über vollständige Fahrfunktionen verfügen und in der Lage sein, Informationen auszutauschen. Das bedeutet, dass das Fahrsystem in der Lage sein sollte, fahrbezogene Informationen von anderen Fahrzeugen und der Infrastruktur zu erhalten und diese Informationen mit seiner eigenen Fahrplanung zu kombinieren, um eine effizientere Fahrleistung zu ermöglichen. Bei der Erfüllung dieser beiden Grundvoraussetzungen müssen auch Sicherheit und Datenschutz berücksichtigt werden. Daher sollten wir uns bei der Gestaltung der Fahrplanungsstrategie von V2X-AD auf die Effizienz der Informationsaustauschstrategie konzentrieren und dadurch die Fahrleistung jedes Fahrzeugs verbessern. Zusammenfassend lässt sich sagen, dass das kollaborativ unterstützte autonome Fahren V2X-AD zwischen Fahrzeug und Straße ein enormes Potenzial hat
“ Aus diesem Grund veröffentlichten Forscher der Shanghai Jiao Tong University und des Shanghai Artificial Intelligence Laboratory einen neuen Forschungsartikel „Towards Collaborative Autonomous Driving: Simulation Platform“ und „End-to-End System“ schlug CoDriving vor: ein kollaboratives End-to-End-Fahrsystem, das eine Informationsaustauschstrategie für die Fahrplanung nutzt, um eine effiziente Kommunikation und Zusammenarbeit zu erreichen. Gleichzeitig bauten die Forscher in diesem Artikel eine Simulationsplattform auf. V2Xverse, diese Plattform bietet eine vollständige Trainings- und Testumgebung für kollaboratives Fahren, einschließlich der Generierung von Datensätzen für kollaboratives Fahren zwischen Fahrzeug und Straße, der Bereitstellung von kollaborativen Full-Stack-Fahrsystemen sowie der Bewertung der Fahrleistung im geschlossenen Regelkreis und der Bewertung von Fahraufgaben in anpassbarer Form „
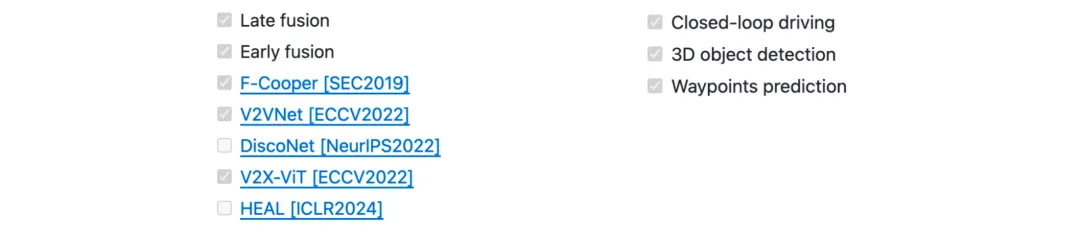
Gleichzeitig integriert die Simulationsplattform V2Xverse die Trainings- und Einsatztestcodes mehrerer bestehender kollaborativer Erfassungsmethoden und nutzt eine Vielzahl von Testaufgaben, um umfassende Fahrfähigkeiten zu testen: 3D-Zielerkennung, Pfadplanung und geschlossene -Loop-autonomes Fahren. V2Xverse durchbricht die Einschränkungen bestehender kollaborativer Sensormethoden, die nur „sehen“, aber nicht „steuern“ können. Es unterstützt die Einbettung bestehender kollaborativer Sensormethoden in ein vollständiges Fahrsystem und das Testen der Fahrleistung in einer Simulationsumgebung. Die Forscher dieses Artikels glauben, dass dies zu besseren Funktionserweiterungen und einem Test-Benchmark führen wird, der besser für tatsächliche Fahrszenarien für die visionsbasierte Fahrzeug-Straße-Kollaborationsforschung beim autonomen Fahren geeignet ist.
- Papier-Link: https://arxiv.org/pdf/2404.09496
- Code-Link: https://github.com/CollaborativePerception/V2Xverse
Forschungshintergrund und Bedeutung
Forschung hierzu Der Artikel konzentriert sich auf kollaboratives autonomes Fahren auf Basis der V2X-Kommunikation (Vehicle-to-everything). Im Vergleich zum autonomen Fahren einzelner Fahrzeuge verbessert das kollaborative autonome Fahren die Wahrnehmung des Fahrzeugs und die Fahrleistung durch den Informationsaustausch zwischen dem Fahrzeug und der Umgebung (z. B. Einheiten am Straßenrand, mit intelligenten Geräten ausgestattete Fußgänger usw.), was Menschen mit eingeschränkter Sehkraft zugute kommt . Sicheres Fahren in komplexen Szenarien (Abbildung 1).
 Abbildung 1. Gefährliches „Geistersonden“-Szenario, das Fahrrad kann das verdeckte Objekt nicht erkennen
Abbildung 1. Gefährliches „Geistersonden“-Szenario, das Fahrrad kann das verdeckte Objekt nicht erkennen
Derzeit konzentriert sich der Großteil der V2X-basierten Zusammenarbeit zwischen Fahrzeug und Straße auf die Optimierung der Wahrnehmungsfähigkeiten auf Modulebene. Allerdings ist die Frage, wie kooperative Sensorfunktionen genutzt werden können, um die endgültige Fahrleistung in integrierten Systemen zu verbessern, noch unzureichend erforscht.
Um dieses Problem zu lösen, zielt dieser Artikel darauf ab, die kollaborative Sensorfähigkeit zu einem kollaborativen Fahrsystem zu erweitern, das umfassende Fahrfähigkeiten abdeckt, einschließlich Schlüsselmodulen wie Wahrnehmung, Vorhersage, Planung und Steuerung. Um kollaboratives autonomes Fahren zu erreichen, sind zwei wichtige Grundlagen erforderlich: eine Plattform, die eine Datenumgebung für V2X-AD bereitstellen kann, und zweitens ein End-to-End-Fahrsystem, das vollständige fahrbezogene Funktionen und Mechanismen zum Informationsaustausch integriert. Aus Plattformsicht baut diese Arbeit V2Xverse auf, eine umfassende kollaborative Simulationsplattform für autonomes Fahren, die einen vollständigen Prozess von der Generierung kollaborativer Fahrdatensätze zwischen Fahrzeug und Straße bis hin zum Einsatz von kollaborativen Full-Stack-Fahrsystemen und der Bewertung der Fahrleistung im geschlossenen Regelkreis bietet . Aus der Perspektive des Fahrsystems stellt dieser Artikel CoDriving vor, ein neues durchgängiges kollaboratives Fahrsystem, das ein auf V2X-Kommunikation basierendes Kollaborationsmodul entwirft und in ein vollständiges autonomes Fahrframework einbettet, um die kollaborative Fahrleistung durch den Austausch sensorischer Informationen zu verbessern. . Die Kernidee von CoDriving ist eine neue Strategie zum Informationsaustausch für die Fahrplanung, die räumlich spärliche, aber wichtige visuelle Merkmalsinformationen für das Fahren als Kommunikationsinhalt nutzt, um die Kommunikationseffizienz zu optimieren und gleichzeitig die Fahrleistung zu verbessern.
V2Xverse: Plattform für die kollaborative Fahrsimulation zwischen Fahrzeug und Straße
Das in diesem Artikel vorgeschlagene Hauptmerkmal von V2Xverse besteht darin, dass es eine Offline-Benchmark-Generierung fahrbezogener Teilaufgaben und eine Online-Bewertung der Fahrleistung in verschiedenen Szenarien im geschlossenen Regelkreis realisieren kann. volle Unterstützung der kollaborativen Entwicklung autonomer Fahrsysteme. Um eine V2X-AD-Szene zu erstellen, richtet V2Xverse in der Szene mehrere Smart-Cars ein, die über umfassende Fahrfähigkeiten verfügen, und platziert mithilfe bestimmter Strategien Straßenrandeinheiten auf beiden Seiten der Straße, um den Smart-Cars eine zusätzliche Sicht zu bieten. Um die Entwicklung kollaborativer autonomer Fahrmethoden zu unterstützen, stellt V2Xverse zunächst Kommunikationsmodule (Fahrzeug-Fahrzeug) und (Fahrzeug-Straßeneinheit) bereit, stellt vollständige Fahrsignale und Expertenanmerkungen für das Systemtraining bereit und bietet auch eine Fahrbewertung im geschlossenen Regelkreis Eine Vielzahl gefährlicher Szenarien. Das Simulationsplattform-Framework ist in Abbildung 2 dargestellt.
 Abbildung 2. V2Xverse-Simulationsplattform-Framework
Abbildung 2. V2Xverse-Simulationsplattform-Framework
Im Vergleich zur bestehenden Carla-basierten Simulationsplattform für autonomes Fahren bietet V2Xverse drei Vorteile. Erstens unterstützt V2Xverse die Fahrsimulation mit mehreren Fahrzeugen, während das Mainstream-Carla-Leaderboard und seine abgeleiteten Plattformen nur die Fahrsimulation mit einem einzelnen Fahrzeug unterstützen. Zweitens unterstützt V2Xverse die vollständige Fahrfunktionssimulation, während die bestehende kollaborative Wahrnehmungssimulationsplattform nur Funktionen im Zusammenhang mit dem Wahrnehmungsmodul unterstützt. Drittens unterstützt V2Xverse umfassende V2X-AD-Szenarien, einschließlich verschiedener Sensorgeräte, Modellintegration und flexibler Szenarioanpassung, siehe Tabelle 1.
 Tabelle 1. Vergleich zwischen V2Xverse und der bestehenden Carla-basierten Simulationsplattform für autonomes Fahren
Tabelle 1. Vergleich zwischen V2Xverse und der bestehenden Carla-basierten Simulationsplattform für autonomes Fahren
CoDriving: Ein durchgängiges selbstfahrendes Modell für effiziente Zusammenarbeit
CoDriving umfasst zwei Komponenten (siehe Abbildung 3): 1 ) End-to-End-Fahrradautonomes Fahrnetzwerk wandelt Sensoreingaben in Fahrsteuersignale um. 2) Durch die fahrorientierte Zusammenarbeit erreichen die Mitarbeiter eine effiziente Kommunikation durch die gemeinsame Nutzung wichtiger Sensorfunktionen für das Fahren und verbessern die Sensorfunktionen von Fahrrad-BEV durch Funktionsaggregation. Die verbesserte Wahrnehmung Mithilfe dieser Funktionen kann das System genauere Wahrnehmungserkennungsergebnisse und Planungsvorhersageergebnisse erzielen. Abbildung 3: Das Gesamtgerüst von CoDriving Wandelt den Weg durch ein Steuermodul um und wandelt die Punkte in Fahrsteuersignale um. Um dies zu erreichen, integriert CoDriving die für das Fahren erforderlichen modularen Komponenten in ein End-to-End-System, darunter 3D-Objektdetektoren, Wegpunktprädiktoren und Controller. CoDriving nutzt die Darstellung aus der Vogelperspektive (BEV), da sie ein einheitliches globales Koordinatensystem bietet, komplexe Koordinatentransformationen vermeidet und die Zusammenarbeit auf der Grundlage räumlicher Informationen besser unterstützt.
 Fahrorientierte Zusammenarbeitsstrategie
Fahrorientierte Zusammenarbeitsstrategie
V2X-Zusammenarbeit löst das unvermeidliche Problem der eingeschränkten Sichtbarkeit von Fahrrädern durch Informationsaustausch. In dieser Arbeit schlägt dieses Papier eine neue fahrorientierte Zusammenarbeitsstrategie vor, um gleichzeitig die Fahrleistung und die Kommunikationseffizienz zu optimieren. Das Schema umfasst i) fahrabsichtsbasierte Wahrnehmungskommunikation, bei der CoDriving räumlich spärliche, aber fahrkritische BEV-Wahrnehmungsmerkmale über ein Fahranforderungsmodul austauscht, und ii) BEV-Funktionsverbesserung, bei der CoDriving die empfangenen Funktionsinformationen nutzt, um die Leistung jedes einzelnen zu verbessern kollaboratives Fahrzeug. BEV-Wahrnehmungsmerkmale. Die erweiterten BEV-Funktionen werden dem System helfen, genauere Wahrnehmungserkennungsergebnisse und Planungsvorhersageergebnisse zu erzielen. Experimentelle Ergebnisse
Mit der V2Xverse-Simulationsplattform testete dieser Artikel die Leistung von CoDriving bei drei Aufgaben: Fahren im geschlossenen Regelkreis, 3D-Zielerkennung und Wegpunktvorhersage. Im wichtigen Closed-Loop-Fahrtest verbesserte sich die Fahrbewertung von CoDriving im Vergleich zur vorherigen SOTA-Methode für durchgängiges autonomes Fahren mit einem Fahrzeug deutlich um 62,49 %, und die Fußgängerkollisionsrate sank um 53,50 %. Bei den Zielerkennungs- und Wegpunktvorhersageaufgaben schneidet CoDriving besser ab als andere kollaborative Methoden, wie in Tabelle 2 gezeigt.
 Tabelle 2. CoDriving ist besser als SOTAs Einzelfahrmethode in der Fahraufgabe mit geschlossenem Regelkreis und besser als andere kollaborative Erfassungsmethoden in den modularen Erfassungs- und Planungsunteraufgaben
Tabelle 2. CoDriving ist besser als SOTAs Einzelfahrmethode in der Fahraufgabe mit geschlossenem Regelkreis und besser als andere kollaborative Erfassungsmethoden in den modularen Erfassungs- und Planungsunteraufgaben
In diesem Artikel wird auch die Zusammenarbeit von CoDriving bei verschiedenen Kommunikationsbandbreiten untersucht Die Leistung wurde verifiziert: Bei den drei Aufgaben Closed-Loop-Fahren, 3D-Zielerkennung und Wegpunktvorhersage übertrifft CoDriving andere Kollaborationsmethoden unter unterschiedlichen Einschränkungen der Kommunikationsbandbreite, wie in Abbildung 4 dargestellt.
 Abbildung 4. Kollaborationsleistung von CoDriving unter verschiedenen Kommunikationsbandbreiten
Abbildung 4. Kollaborationsleistung von CoDriving unter verschiedenen Kommunikationsbandbreiten
Abbildung 5 zeigt einen Fahrfall von CoDriving in der V2Xverse-Simulationsumgebung. In der Szene in Abbildung 5 stürzte ein Fußgänger im toten Winkel plötzlich von der Straße. Es ist zu erkennen, dass das selbstfahrende Fahrrad ein eingeschränktes Sichtfeld hatte und dem Fußgänger nicht im Voraus ausweichen konnte, was zu einem schweren Autounfall führte Unfall. CoDriving nutzt die gemeinsamen Sichteigenschaften von Straßenrandgeräten, um Fußgänger im Voraus zu erkennen und ihnen sicher auszuweichen.
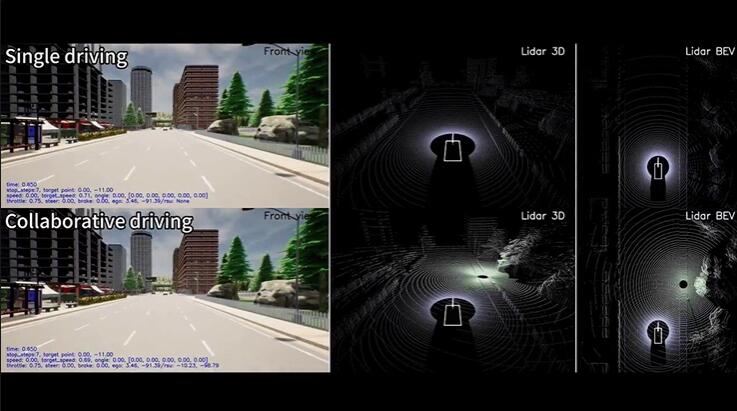
Abbildung 5(1) Im Vergleich zu selbstfahrenden Fahrrädern mit eingeschränkter Sicht nutzt CoDriving die von Straßenrandgeräten bereitgestellten Informationen, um Fußgänger in toten Winkeln zu erkennen.  Abbildung 5(2) Fahrradfahren Nicht rechtzeitiges Ausweichen führte zu einer Kollision
Abbildung 5(2) Fahrradfahren Nicht rechtzeitiges Ausweichen führte zu einer Kollision
Zusammenfassung
Diese Arbeit hilft bei der Entwicklung kollaborativer autonomer Fahrmethoden durch den Aufbau einer Simulationsplattform V2Xverse und schlägt ein neues durchgängiges autonomes Fahrsystem vor. Unter anderem ist V2Xverse eine kollaborative V2X-Fahrsimulationsplattform, die Fahrtests im geschlossenen Regelkreis unterstützt. Diese Plattform bietet einen vollständigen Entwicklungskanal für die Entwicklung kollaborativer autonomer Fahrsysteme mit dem Ziel, die endgültige Fahrleistung zu verbessern. Erwähnenswert ist, dass V2Xverse auch den Einsatz einer Vielzahl vorhandener autonomer Fahrsysteme für einzelne Fahrzeuge sowie das Training und Fahrtests im geschlossenen Regelkreis einer Vielzahl bestehender kollaborativer Sensormethoden unterstützt. Gleichzeitig schlägt dieser Artikel ein neues durchgängiges kollaboratives autonomes Fahrsystem CoDriving vor, das die Fahrleistung verbessert und die Kommunikationseffizienz optimiert, indem es wichtige Informationen zur Fahrwahrnehmung teilt. Eine umfassende Bewertung des gesamten Fahrsystems zeigt, dass CoDriving bei unterschiedlichen Kommunikationsbandbreiten deutlich besser ist als das Einzelfahrzeug-Selbstfahrsystem. Die Forscher dieses Artikels glauben, dass die V2Xverse-Plattform und das CoDriving-System potenzielle Lösungen für zuverlässigeres autonomes Fahren bieten.
Das obige ist der detaillierte Inhalt vonOpen Source! V2Xverse: Übergabe und Veröffentlichung der ersten Simulationsplattform und des End-to-End-Modells für V2X. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Detaillierte Erläuterung der Verwendung des Orbit Controls-Plug-Ins (Orbit Control) durch Three.js zur Steuerung der Modellinteraktion
- Biny – ein ultraleichtes Open-Source-PHP-Framework von Tencent
- Was ist ein Haufen? Was ist der Methodenbereich? Einführung in den Heap- und Methodenbereich im JVM-Speichermodell
- So exportieren Sie ein Modell in Navicat
- Ist vscode Open Source?